OpenCV
安装
python安装
1
pip install opencv-contrib-python
API
cv2.imread
读取图片:
cv2.imread(path, flags)
- path: 该参数制定图片的路径,可以使用相对路径,也可以使用绝对路径;
- flags:指定以何种方式加载图片,有三个取值:
- cv2.IMREAD_COLOR:读取一副彩色图片,图片的透明度会被忽略,默认为该值,实际取值为1;
- cv2.IMREAD_GRAYSCALE:以灰度模式读取一张图片,实际取值为0
- cv2.IMREAD_UNCHANGED:加载一副彩色图像,透明度不会被忽略。
如果给定的图片路径不对,该函数不会抛出异常,而是返回一个None
cv2.imshow
显示图片
cv2.imshow(winname, mat)
- winame:一个字符串,表示创建的窗口名字,每一个窗口必须有一个唯一的名字;
- mat:是一个图片矩阵,numpy.ndarray类型
在图片显示的过程中,通常会伴随几个其他的函数,他们分别是:
- cv2.waitKey()
- cv2.destroyAllWindows()
- cv2.destroyWindow()
- cv2.namedWindow()
如果没有cv2.waitKey()函数,图像不会显示(也许是一闪而过,我们人眼观察不到)
cv2.destroyAllWindows()用来销毁所有已经创建的窗口, 如果需要销毁指定窗口使用cv2.destroyWindow()函数,他接受一个表示窗口名字的名字。
直接用cv2.imshow()创建的窗口是自动适应图片大小的,不能缩放,如果我们想放大缩小窗口,必须单独用cv2.namedWindow(),并通过flag参数指定窗口模式为cv2.WINDOW_NORMAL,默认为cv2.WINDOW_AUTOSIZE.
cv2.imwrite
保存图片
cv2.imwrite(filename, img)
- filename: 保存文件的路径名
- img: 表示图像的numpy.ndarray对象
cv2.cvtColor
cvtColor(src,dst,code,dstCn) ===> (原图像,输出图像,color转化代码,输出通道)
- 原图像:input image: 8-bit unsigned, 16-bit unsigned ( CV_16UC… ), or single-precision floating-point.,解释的很清楚8位无符号,16位无符号,或者单精浮点数。
- 输出图像:output image of the same size and depth as src. 输出与src相同大小和深度的图像。
- code :color转化代码
COLOR_BGR2BGRA
COLOR_RGB2RGBA
COLOR_BGRA2BGR
COLOR_RGBA2RGB
COLOR_BGR2GRAY
COLOR_RGB2GRAY
COLOR_GRAY2BGR
COLOR_GRAY2RGB
COLOR_BGR2HSV
COLOR_RGB2HSV
画矩形和文字注释
cv2.rectangle(img, pt1, pt2, color[, thickness[, lineType[, shift]]])
- img:要画的圆所在的矩形或图像
- pt1:矩形左上角的点
- pt2:矩形右下角的点
- color:线条颜色,如 (0, 0, 255) 红色,BGR
- thickness:线条宽度
- lineType:
8 (or omitted) : 8-connected line
4:4-connected line
CV_AA - antialiased line - shift:坐标点小数点位数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
##!/usr/bin/python
## -*- coding: UTF-8 -*-
"""
@Time : 2018-11-13 21:03
@Author : jianjun.wang
@Email : alanwang6584@gmail.com
"""
import numpy as np
import cv2 as cv
img = np.zeros((320, 320, 3), np.uint8) ##生成一个空灰度图像
print img.shape ## 输出:(320, 320, 3)
## 矩形左上角和右上角的坐标,绘制一个绿色矩形
ptLeftTop = (60, 60)
ptRightBottom = (260, 260)
point_color = (0, 255, 0) ## BGR
thickness = 1
lineType = 4
cv.rectangle(img, ptLeftTop, ptRightBottom, point_color, thickness, lineType)
## 绘制一个红色矩形
ptLeftTop = (120, 100)
ptRightBottom = (200, 150)
point_color = (0, 0, 255) ## BGR
thickness = 1
lineType = 8
cv.rectangle(img, ptLeftTop, ptRightBottom, point_color, thickness, lineType)
cv.namedWindow("AlanWang")
cv.imshow('AlanWang', img)
cv.waitKey (10000) ## 显示 10000 ms 即 10s 后消失
cv.destroyAllWindows()
cv2.putText(img, ‘lena’, (50,150), cv2.FONT_HERSHEY_COMPLEX, 5, (0, 255, 0), 12)
cv2.resize
1
img_test2 = cv.resize(img, (0, 0), fx=0.25, fy=0.25, interpolation=cv.INTER_NEAREST)
- (0, 0): 输出图片尺寸, 如果为0受到fx和fy的控制
- fx, fy: x轴和y轴的缩放因子
- interpolation: 插值方式
cv2.circle
cv2.circle(img, center, radius, color[, thickness[, lineType[, shift]]])
circle() 函数可以绘制以一个点为圆心特定半径的圆
- img:要画的圆所在的矩形或图像
- center:圆心坐标,如 (100, 100)
- radius:半径,如 10
- color:圆边框颜色,如 (0, 0, 255) 红色,BGR
- thickness:正值表示圆边框宽度. 负值表示画一个填充圆形
- lineType:圆边框线型,可为 0,4,8
- shift:圆心坐标和半径的小数点位数
cv2.line
1
cv2.line(plot,(0,y),(int(h * mul),y),(255,0,0),w)
- 第一个参数 img:要划的线所在的图像;
- 第二个参数 pt1:直线起点
- 第三个参数 pt2:直线终点
- 第四个参数 color:直线的颜色
- 第五个参数 thickness=1:线条粗细
cv2.remap
cv.remap( src, map1, map2, interpolation[, dst[, borderMode[, borderValue]]] )
重映射,就是把一幅图像中某位置的像素放置到另一个图片指定位置的过程。

- map1: 用于存放图像X方向的映射关系,类型必须是CV_32FC1的。
- map2:于存放图像Y方向的映射关系,类型必须是CV_32FC1的。
- interpolation:插值方式
在国内的网站上讲这个函数都十分简单, 并不清楚, 在stackoverflow找到了好的解释。
首先,mapx和mapy在干什么?
mapx和mapy每个对应位置取出来一个点, 可以确定地对应到原图中的一个点,将这个点的像素值赋值给mapx和mapy对应矩阵的位置, 如果mapx和mapy是非整数, 那么会采用插值的方式来确定这个点的像素值, 举个例子:
如果是一一对应的关系:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
img = np.uint8(np.random.rand(8, 8)*255)
print(img)
##array([[230, 45, 153, 233, 172, 153, 46, 29],
## [172, 209, 186, 30, 197, 30, 251, 200],
## [175, 253, 207, 71, 252, 60, 155, 124],
## [114, 154, 121, 153, 159, 224, 146, 61],
## [ 6, 251, 253, 123, 200, 230, 36, 85],
## [ 10, 215, 38, 5, 119, 87, 8, 249],
## [ 2, 2, 242, 119, 114, 98, 182, 219],
## [168, 91, 224, 73, 159, 55, 254, 214]], dtype=uint8)
map_y = np.array([[0, 1], [2, 3]], dtype=np.float32)
map_x = np.array([[5, 6], [7, 10]], dtype=np.float32)
mapped_img = cv2.remap(img, map_x, map_y, cv2.INTER_LINEAR)
##array([[153, 251],
## [124, 0]], dtype=uint8)
1
2
3
4
5
6
7
8
9
map_y
=====
0 1
2 3
map_x
=====
5 6
7 10
可以看到有mapx = 5, mapy = 0确定的点为第0行,第5列的像素值, 该值为153。其他的点类似。
那么当mapx和mapy为非整数的时候:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
img = np.uint8(np.random.rand(8, 8)*255)
##array([[230, 45, 153, 233, 172, 153, 46, 29],
## [172, 209, 186, 30, 197, 30, 251, 200],
## [175, 253, 207, 71, 252, 60, 155, 124],
## [114, 154, 121, 153, 159, 224, 146, 61],
## [ 6, 251, 253, 123, 200, 230, 36, 85],
## [ 10, 215, 38, 5, 119, 87, 8, 249],
## [ 2, 2, 242, 119, 114, 98, 182, 219],
## [168, 91, 224, 73, 159, 55, 254, 214]], dtype=uint8)
map_y = np.array([[0, 1.5], [2, 3]], dtype=np.float32)
map_x = np.array([[5, 6], [7, 10]], dtype=np.float32)
mapped_img = cv2.remap(img, map_x, map_y, cv2.INTER_LINEAR)
##array([[153, 203],
## [124, 0]], dtype=uint8)
可以看到,当我把mapx中的1改为1.5后,对应的值变成了203, 这个值怎么算出来的。
首先mapy对应第6列, mapx在第1列和第2列之间, 通过以下公式计算得到:
\[dst = 0.5 * 251 + 0.5 * 155\]并不是所有的插值都是按照这样的比例关系算的,但是意思是这么个意思。
上述的行和列都从0开始算起。
cv2.warpAffine
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
- M: 变换矩阵,需要通过其它函数获得,当然也可以手动输入。
- dst: 输出图像,尺寸为dsize, 类型和src相同
- dsize: 输出图像的尺寸
- flags: 结合的插值方式 (see InterpolationFlags) 以及选项 WARP_INVERSE_MAP意思是 M 是变换的逆 ( dst→src ).
cv2.getRotationMatrix2D
getRotationMatrix2D(center, angle, scale)
- center表示中间点的位置
- angle表示逆时针旋转角度
- scale表示缩放比例
cv2.copyMakeBorder
给图片做填充(paddinng)
cv2.copyMakeBorder(img,120,120,0,0,cv2.BORDER_CONSTANT,value=[0, 0, 0])
- src : 输入的图片
- top, bottom, left, right :相应方向上的边框宽度
- borderType:定义要添加边框的类型,它可以是以下的一种:
-
- cv2.BORDER_CONSTANT:添加的边界框像素值为常数(需要额外再给定一个参数)
-
- cv2.BORDER_REFLECT:添加的边框像素将是边界元素的镜面反射,类似于gfedcb | abcdefgh | gfedcba
-
- cv2.BORDER_REFLECT_101 or cv2.BORDER_DEFAULT:和上面类似,但是有一些细微的不同,类似于gfedcb | abcdefgh | gfedcba
-
- cv2.BORDER_REPLICATE:使用最边界的像素值代替,类似于aaaaaa | abcdefgh | hhhhhhh
-
- cv2.BORDER_WRAP:不知道怎么解释,直接看吧,cdefgh | abcdefgh | abcdefg
- value:如果borderType为cv2.BORDER_CONSTANT时需要填充的常数值。
cv2.addWeighted
cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) → dst
- src1: 第一个输入数组
- alpha:第一个数组元素的权重
- src2: 和src1形同通道和尺寸大小的第二个输入数组
- beta:第二个数组元素的权重
- dst:和输入元素相同通道和尺寸的输出数组
- gamma:给个和上加上的标量
- dtype:输出数组可选的深度;当两个输入数组具有相同的深度, dtype可以被设置为-1, 它等价于src1.depth().
等价于下面的公式:
\[dst = src1 * alpha + src2 * beta + gamma;\]cv2.canny
- T1, T2为阈值, 凡是高于T2的都保留, 凡是小于T1都丢弃, 从高于T2的像素出发, 凡是大于T1而且相互连接的,都保留。最终得到一个输出二值图像。
- 推荐的高低阈值比值为T2:T1 = (3:1 ) / (2:1)其中T2为高阈值, T1为低阈值。
1
2
3
4
5
6
7
8
Canny(
inputArray src, //8-bit的输入图像
OutputArray edges, //输出边缘图像, 一般都是二值图像
double threshold1, //低阈值, 常取高阈值的1/2, 或者1/3
double threshold2, //高阈值
int aptertureSize, //Sobel算子的size, 通常3x3, 取值3
boot L2gradient //选择true表示是L2来归一化, 否则用L1归一化
)
cv2.VideoWriter_fourcc
VideoWriter_fourcc为视频编解码器, fourcc意为四字符代码(Four-Character Codes),顾名思义,该编码由四个字符组成,下面是VideoWriter_fourcc对象一些常用的参数,注意:字符顺序不能弄混
- cv2.VideoWriter_fourcc(‘I’, ‘4’, ‘2’, ‘0’),该参数是YUV编码类型,文件名后缀为.avi
- cv2.VideoWriter_fourcc(‘P’, ‘I’, ‘M’, ‘I’),该参数是MPEG-1编码类型,文件名后缀为.avi
- cv2.VideoWriter_fourcc(‘X’, ‘V’, ‘I’, ‘D’),该参数是MPEG-4编码类型,文件名后缀为.avi
- cv2.VideoWriter_fourcc(‘T’, ‘H’, ‘E’, ‘O’),该参数是Ogg Vorbis,文件名后缀为.ogv
- cv2.VideoWriter_fourcc(‘F’, ‘L’, ‘V’, ‘1’),该参数是Flash视频,文件名后缀为.flv
fourcc为 四个字符用来表示压缩帧的codec 例如:
- CV_FOURCC(‘P’,’I’,’M’,’1’) = MPEG-1 codec
- CV_FOURCC(‘M’,’J’,’P’,’G’) = motion-jpeg codec
- CV_FOURCC(‘M’, ‘P’, ‘4’, ‘2’) = MPEG-4.2 codec
- CV_FOURCC(‘D’, ‘I’, ‘V’, ‘3’) = MPEG-4.3 codec
- CV_FOURCC(‘D’, ‘I’, ‘V’, ‘X’) = MPEG-4 codec
- CV_FOURCC(‘U’, ‘2’, ‘6’, ‘3’) = H263 codec
- CV_FOURCC(‘I’, ‘2’, ‘6’, ‘3’) = H263I codec
- CV_FOURCC(‘F’, ‘L’, ‘V’, ‘1’) = FLV1 codec
- 若编码器代号为 -1,则运行时会弹出一个编码器选择框.
cv2.videowriter
1
VideoWriter(filename, fourcc, fps, frameSize[, isColor]) -> <VideoWriter object>
- 第一个参数是要保存的文件的路径
- fourcc 指定编码器
- fps 要保存的视频的帧率
- frameSize 要保存的文件的画面尺寸
- isColor 指示是黑白画面还是彩色的画面
读取视频帧率、分辨率、读取视频总帧数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
#——————————————————————————————
#————————添加自己的视频播放路径———————————
video_path="F:/Zeng-20180622/Video180621/1.flv"
# 创建一个视频读写类
video_capture=cv2.VideoCapture(video_path)
#读取视频的fps, 大小
fps=video_capture.get(cv2.CAP_PROP_FPS)
size=(video_capture.get(cv2.CAP_PROP_FRAME_WIDTH),video_capture.get(cv2.CAP_PROP_FRAME_HEIGHT))
print("fps: {}\nsize: {}".format(fps,size))
#读取视频时长(帧总数)
total = int(video_capture.get(cv2.CAP_PROP_FRAME_COUNT))
print("[INFO] {} total frames in video".format(total))
#设定从视频的第几帧开始读取
#From : https://blog.csdn.net/luqinwei/article/details/87973472
frameToStart = 2000
video_capture.set(cv2.CAP_PROP_POS_FRAMES, frameToStart);
使用键盘控制视频
1
2
3
4
5
6
7
8
9
#--------键盘控制视频---------------
#读取键盘值
key = cv2.waitKey(1) & 0xff
#设置空格按下时暂停
if key == ord(" "):
cv2.waitKey(0)
#设置Q按下时退出
if key == ord("q"):
break
显示视频播放进度
1
2
3
4
5
6
7
8
9
#显示当前视频已播放时间和总时间
#计算当前
now_seconds=int(current_frame /fps%60)
now_minutes=int(current_frame/fps/60)
total_second=int(total /fps%60)
total_minutes=int(total/fps/60)
# { <参数序号> : <填充> <对齐)> <宽度> <,> <.精度> <类型>}.
Time_now_vs_total="Time:{:>3}:{:>02}|{:>3}:{:0>2}".format(now_minutes,now_seconds,total_minutes,total_second)
print(Time_now_vs_total)
CV概念知识
图像格式
HSV图像: 色调(H), 饱和度(S), 亮度(V)
LAB图像: 亮度(L), 红色至绿色的范围(A),蓝色至黄色的范围(B)
形态学操作
腐蚀:白像素的连同域变小
膨胀: 白像素的连同域变大
开操作:先膨胀再腐蚀, 会让相近的小点连同起来
闭操作:先腐蚀再膨胀, 会让一些小点消失
Trick
视频的加载和保存
编程实现从视频文件中读取并显示视频
1
2
3
4
5
6
7
8
9
10
11
12
13
14
import cv2
cap = cv2.VideoCapture(‘vtest.avi’)##打开相机
while( True):
ret,frame = cap.read()##捕获一帧图像
if ret:
cv2.imshow('frame',frame)
cv2.waitKey(25)
else:
break
cap.release()##关闭相机
cv2.destroyAllWindows()##关闭窗口
仿射变换(Affine Transformation)
图像的几何变换——拉伸、收缩、扭曲、旋转(stretch,shrink,distortion,rotation)
拉伸、收缩、扭曲、旋转是图像的几何变换,在三维视觉技术中大量应用到这些变换,又分为仿射变换和透视变换。仿射变换通常用单应性(homography)建模,利用cvWarpAffine解决稠密仿射变换,用cvTransform解决稀疏仿射变换。仿射变换可以将矩形转换成平行四边形,它可以将矩形的边压扁但必须保持边是平行的,也可以将矩形旋转或者按比例变化。透视变换提供了更大的灵活性,一个透视变换可以将矩阵转变成梯形。当然,平行四边形也是梯形,所以仿射变换是透视变换的子集。
算法原理简介
首先,我们需要使用轮廓检测等其它方法获取到目标的4个关键点坐标值;然后利用相应的变换关系获取到新的4个坐标点;接着利用这4对关键点计算出仿射变换矩阵M;最后应用仿射变换矩阵到目标中即可。
算法实现步骤
- 读取输入图片;
- 获取原始目标的4个坐标点(左上,左下,右上,右下);
- 通过4个坐标点计算出新的坐标点;
- 使用opencv计算仿射变换矩阵M;
- 应用仿射变换进行变换并进行结果显示。
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
- dst: output image that has the size dsize and the same type as src .
- dsize: size of the output image.
- flags: combination of interpolation methods (see InterpolationFlags) and the optional flag WARP_INVERSE_MAP that means that M is the inverse transformation ( dst→src ).
- borderMode: pixel extrapolation method (see BorderTypes); when borderMode=BORDER_TRANSPARENT, it means that the pixels in the destination image corresponding to the “outliers” in the source image are not modified by the function.
- borderValue: value used in case of a constant border; by default, it is 0.
cv.GetAffineTransform(src, dst, mapMatrix) → None
- src – Coordinates of triangle vertices in the source image
- dst – Coordinates of the corresponding triangle vertices in the destination image.
M=cv2.getAffineTransform(pos1,pos2),其中两个位置就是变换前后的对应位置关系。输出的就是仿射矩阵M。然后在使用函数cv2.warpAffine()。
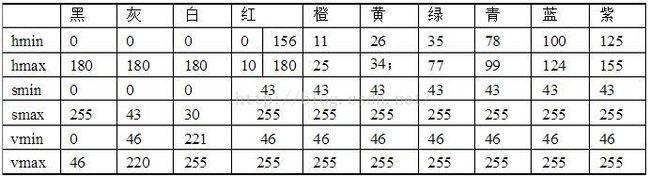
更换绿色背景
HSV过滤图片的操作
H(色调):0-180
S(饱和度):0-255
V(黑暗的程度):0-255
下图是HSV的颜色的取值范围,根据范围取值可以过滤掉某种颜色:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
def change_bg(self, frame, index=0):
height, width, channel = frame.shape
bg = np.zeros((height, width, channel))
if index == 0:
bg[:, :, 0] = 255
bg[:, :, 1] = 0
bg[:, :, 2] = 0
elif index == 1:
bg[:, :, 0] = 0
bg[:, :, 1] = 255
bg[:, :, 2] = 0
elif index == 2:
bg[:, :, 0] = 0
bg[:, :, 1] = 0
bg[:, :, 2] = 255
elif index == 3:
bg[:, :, 0] = 255
bg[:, :, 1] = 255
bg[:, :, 2] = 0
elif index == 4:
bg[:, :, 0] = 0
bg[:, :, 1] = 255
bg[:, :, 2] = 255
else:
bg[:, :, 0] = 255
bg[:, :, 1] = 0
bg[:, :, 2] = 255
hsv=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)#进行色彩值转换,RGB到HSV
lower_hsv = np.array([35,43,46])#色彩范围h s v三变量的最小取值
upper_hsv = np.array([77, 255, 255])#色彩范围h s v三变量的最小取值
mask=cv2.inRange(hsv,lowerb=lower_hsv,upperb=upper_hsv) #进行色值去范围,取出对应的色彩范围进行过滤
mask_bg = mask / 255.
mask_fg=cv2.bitwise_not(mask) / 255.
frame[:, :, 0] = frame[:, :, 0] * mask_fg + bg[:, :, 0] * mask_bg
frame[:, :, 1] = frame[:, :, 1] * mask_fg + bg[:, :, 1] * mask_bg
frame[:, :, 2] = frame[:, :, 2] * mask_fg + bg[:, :, 2] * mask_bg
return frame
PIL(Image)用法
open
1
2
>>> from PIL import Image
>>> im = Image.open("hopper.ppm")
1
2
>>> print(im.format, im.size, im.mode)
PPM (512, 512) RGB
读取出来就是RGB三通道的。
有些代码使用 convert(‘RGB) , 以前读取出来似乎默认是RGBA。
显示Image类型图像
方法1:
1
img.show()
方法2:
1
2
plt.imshow(img)
plt.show()
transpose方法
im.transpose(method)⇒ image
返回当前图像的翻转或者旋转的拷贝。变量方法的取值为:FLIP_LEFT_RIGHT,FLIP_TOP_BOTTOM,ROTATE_90,ROTATE_180,或ROTATE_270。
Image、numpy转化
Image转numpy:
img = numpy.array(im)
numpy转Image:
img = Image.fromarray(img.astype(‘uint8’)).convert(‘RGB’)
FFMPEG
读取YUV格式视频
1
ffplay -f rawvideo -video_size 1920x1080 a.yuv
完整命令
1
ffmpeg -f rawvideo -vcodec rawvideo -s 1920x1080 -r 25 -pix_fmt yuv420p -i inputfile.yuv -c:v libx264 -preset ultrafast -qp 0 output.mp4
对所有其他参数的一点解释:
- 随着-f rawvideo你输入格式设置为原始视频容器
- 随着-vcodec rawvideo你设置输入文件不压缩
- 随-i inputfile.yuv您设置输入文件
- 随着-c:v libx264你设置编码器编码的视频libx264.
- 该-preset ultrafast设置仅加快压缩速度,因此您的文件大小将大于设置的大小veryslow.
- 随着-qp 0你设置最高质量.在我们的例子中,0是最好的,51是最差的质量.
- 然后output.mp4是您的新容器来存储您的数据.
修改FPS
1. 降低FPS,增加视频时长
说对于输入文件是40帧的媒体,我们可以通过
1
2
ffmpeg -r 80 -i input output
ffmpeg -r 20-i input output
使其输出文件的时长分别为原来的一半和两倍,即播放速度为原来的两倍和一半。
2. 降低视频FPS,视频时长不变,视频质量变差
如果我们认为40帧的文件码流太大,我们可以通过降低输出文件帧率的方法降低码流:
1
ffmpeg -i input -r 20 output
这样输出文件的码流理论上为输入文件的一半左右。
-r 所在位置不同,决定其参数是对输入视频还是输出视频起作用。
Bug总结
‘depth’ is 6 (CV_64F)
CV_64F表示numpy数组’dtype’是64位浮点opencv只适用于’float32’(32位浮点),其中imshow的图像范围是0.0-1.0或’uint8’(无符号8位)0-255。用8位显示更高位图像自然会报错。 同时附上数据类型mat和位数关系: http://blog.sina.com.cn/s/blog_662c7859010105za.html
Reference
- OpenCV——图片的加载、显示、保存(python)、
- 【Python+OpenCV入门学习】四、视频的读取、显示、保存
- Python+Opencv4点仿射变换
- Opencv-Python学习笔记五——图像翻转,平移,仿射及透视 warpAffine
- [python]OpenCV之cvtColor
- Python-OpenCV 图像叠加or图像混合加权(cv2.addWeighted)
- How do I use OpenCV’s remap function?
- opencv-python图片边框填充(padding)
- opencv关于图像imshow显示报错’depth’ is 6 (CV_64F)
- Python 用 OpenCV 画矩形 (4)
- python下的opencv画矩形和文字注释
- Python 用 OpenCV 画点和圆 (2)
- ubuntu中ffmpeg修改视频FPS,帧数
- 【Python-opencv3.4】视频基本操作(帧率,总视频帧数、从第N帧开始播放、播放进度显示、按键控制视频)
- 【OpenCV3.3+Python3.6】图片的HSV色彩空间过滤颜色