Abstract
我们提出了SR3,一种通过重复优化实现图像超分辨率的方法。
SR3使去噪扩散概率模型适应条件图像生成,并通过随机迭代去噪过程执行超分辨率。
输出生成从纯高斯噪声开始,并使用训练在各种噪声级别进行去噪的 U-Net 模型迭代细化噪声输出。
SR3在不同放大系数、人脸和自然图像的超分辨率任务上表现出强大的性能。
我们与SOTA GAN方法相比,对CelebA-HQ的标准8倍面超分辨率任务进行人类评估。
SR3实现了接近50%的愚弄率,这表明了逼真的输出,而GAN不超过34%的愚弄率。
我们进一步展示了SR3在级联图像生成中的有效性,其中生成模型与超分辨率模型链接,在ImageNet上产生了11.3的竞争性FID分数。
Conditional Denoising Diffusion Model
给定一个输出-输出图像对的数据集, 表示为 $D = {x_i, y_i}_{i=1}^N$, 其表示从未知条件分布 $p(y \mid x)$ 中采样。这是一个 one-to-many 的映射, 单个源图像可能对应多个目标图像。我们的目标是通过一个随机迭代优化学习一个参数化估计 $p(y \mid x)$,其将一个源图像 $x$ 映射为一个目标图像 $y \in R^d$。 作者通过将 DDPM 变成一个条件图像生成来实现这个目标。
条件 DDPM 模型在 $T$ 个优化步骤生成一个目标图像 $y_0$。 从一个噪声图像 $y_T \thicksim N(0, I)$ 开始, 模型通过学习到的条件转移分布 $p_\theta(y_{t-1} \mid y_t, x)$ ,连续的迭代 ($y_{T-1}, y_{T-2}, …, y_0$) 迭代优化图像, 最终得到 $y_0 \thicksim p(y \mid x)$(见图2)。
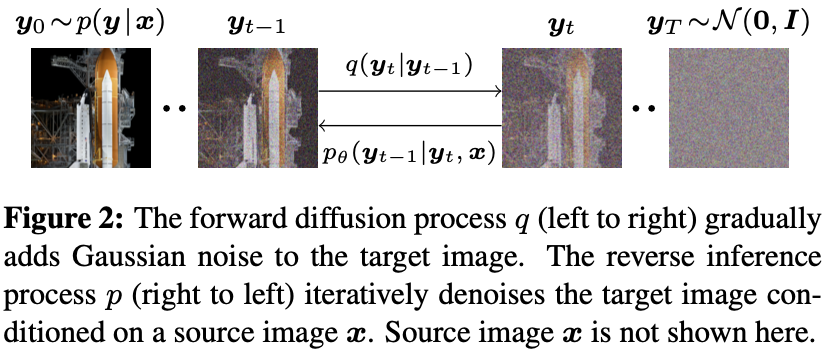
推理链中中间图像的分布是用正向扩散过程定义的,该扩散过程通过固定的马尔可夫链逐渐将高斯噪声添加到信号中,表示为 $q(y_t \mid y_{t-1})$。 我们模型的目标是通过以 $x$ 为条件的反向马尔可夫链迭代地从噪声中恢复信号,从而逆转高斯扩散过程。原则上,每个前向过程步骤也可以以 $x$ 为条件,但我们把它留给未来的工作。我们使用神经去噪模型 $f_\theta$ 学习反向链,该模型将源图像和噪声目标图像作为输入,并估计噪声。我们首先概述了前向扩散过程,然后讨论了如何训练和用于推断我们的去噪模型 $f_\theta$。
Gaussion Diffusion Process
我们首先定义了一个正向马尔可夫扩散过程 $q$ ,该过程通过 $T$ 迭代逐渐将高斯噪声添加到高分辨率图像 $y_0$ 中:
\[y(y_{1:T} \mid y_0) = \prod_{t=1}^T q(y_t \mid y_{t-1}) \tag{1}\] \[y(y_t \mid y_{t-1}) = N(y_t \mid \sqrt{\alpha}_t y_{t-1}, (1 - \alpha_t) I) \tag{2}\]其中, 标量参数 $\alpha_{1:T}$ 是超参数, 服从于 $1 < \alpha_t < 1$, 其决定了每次迭代添加噪声的方差。注意到 $y_{t-1}$ 由 $\sqrt{\alpha_t}$ 来确保随机变量的方差有界,当 $t \rightarrow \infty$。 例如, $y_{t-1}$ 的方差为1, $y_t$ 的方差也是1。
重要的是, 给定 $y_0$ 我们可以确定 $y_t$ 的分布, 通过边缘化中间步骤:
\[q(y_t \mid y_0) = N(y_t \mid \sqrt{\gamma_t}y_0, (1 - \gamma_t)I) \tag{3}\]其中 $\gamma_t = \prod_{i=1}^t \alpha_i$。 此外,给定 $(y_0, y_t)$ , 通过一些代数操作和完全平方, 我们可以得到 $y_{t-1}$ 的后验分布:
\[q(y_{t-1} \mid y_0, y_t) = N(y_{t-1} \mid \mu, \sigma^2 I) \\ \mu = \frac{\sqrt{\gamma_{t-1}}(1 - \alpha_t)}{1 - \gamma_t} y_0 + \frac{\sqrt{\alpha_t}(1 - \gamma_{t-1})}{1 - \gamma_t} y_t \\ \sigma^2 = \frac{(1 - \gamma_{t-1})(1 - \alpha_t)}{1 - \gamma_t} \tag{4}\]当参数化反向链并制定反向链对数似然的变分下限时,这种后验分布很有帮助。接下来,我们将讨论如何学习神经网络来反转这种高斯扩散过程。
Optimizing the Denoising Model
为了帮助逆扩散过程, 我们利用额外的源图像 $x$ 信息, 并且优化一个神经去噪模型 $f_\theta$, 其将源图像 $x$ 和噪声目标 $\tilde y$ 作为输入
\[\tilde y = \sqrt{\gamma} y_0 + \sqrt{1 - \gamma} \epsilon, \quad \epsilon \thicksim N(0, I) \tag{5}\]目标位恢复无噪声的目标图像 $y_0$。 噪声目标图像 $\tilde y$ 的定义与 Eq. (3) 中前向过程不同步骤的噪声图像的边缘分布相似。
除了源图像 $x$ 和 噪声目标图像 $\tilde y$, 因为有噪声 $\gamma$ 的方差, 去噪模型 $f_\theta(x, \tilde y, \gamma)$ 有足够多的数据作为输入, 被训练用来预测噪声向量 $\epsilon$。 训练 $f_\theta$ 的目标函数为:
\[E_{(x, y)} E_{\epsilon, \gamma} \| f_\theta(x, \sqrt{\gamma} y_0 + \sqrt{1 - \gamma} \epsilon, \gamma) - \epsilon \|_p^p \tag{6}\]其中 $\epsilon \thicksim N(0, 1)$, $(x, y)$ 从训练数据集中采样得到, $p \in {1, 2}$, 并且 $\gamma \in p(\gamma)$。 $\gamma$ 的分布对于模型和生成输出的质量和有大的影响。 我们在 2.4 节中讨论了 $p(\gamma)$ 的选择。
相比于将 $f_\theta$ 的输出回归 $\epsilon$, 我们可以回归 $f_\theta$ 的输出为 $y_0$。 给定 $\gamma$ 和 $\tilde y$, $\epsilon$ 和 $y_0$ 的值可以从彼此确定性地得到, 但是改变回归目标对于损失函数的规模有一个大的影响。如果考虑损失函数的规模而改变 $p(\gamma)$, 我们估计两个变体都可以很好地工作。进一步研究用于训练去噪模型的损失函数是该领域未来研究的有趣途径。
Inference via Iterative Refinement
在我们的模型下,推断被定义为反向马尔可夫过程,该过程与前向传播过程相反的方向发展,从高斯噪声 $y_T$ 开始:
\[p_\theta(y_{0:T} \mid x) = p(y_T)\prod_{t=1}^T p_\theta(y_{t-1} \mid y_t, x) \tag{7}\] \[p(y_T) = N(y_T \mid 0, I) \tag{8}\] \[p_\theta(y_{t-1} \mid y_t, x) = N(y_{t-1} \mid \mu_\theta(x, y_t, \gamma_t), \sigma_t^2I) \tag{9}\]我们根据各向同性的高斯条件分布定义推理过程, $p_\theta(y_{t-1} \mid y_t, x)$, 其通过学习得到。如果将前进过程步骤的噪声方差设置为尽可能小, 例如 $\alpha_{1:T} \approx 1$, 最优的反向过程 $p(y_{t-1} \mid y_t, x)$ 将接近高斯噪声。因此,我们在推断过程(9)中选择高斯条件可以合理地拟合真实逆过程。 同时, $1 - \gamma_T$ 应该足够大, 以便 $y_T$ 根据先验 $p(y_T) = N(y_T \mid 0, I)$ 估计分布, 允许采样过程从一个纯高斯噪声开始。
给定任意噪声图像 $\tilde y$ 包括 $y_t$。 去噪模型 $f_\theta$ 被训练用于估计 $\epsilon$。因此, 给定 $y_t$, 我们可以通过重写 (5) 式估计 $y_0$ :
\[\hat y_0 = \frac{1}{\sqrt{\gamma_t}}(y_t - \sqrt{1 - \gamma_t} f_\theta(x, y_t, \gamma_t)) \tag{10}\]将估计的 $\hat y_0$ 替换 (4) 中的 $q(y_{t-1} \mid y_0, y_t)$ 的后验分布来参数化 $p_\theta(y_{t-1} \mid y_t, x)$ 的均值:
\[\mu_\theta(x, y_t, \gamma_t) = \frac{1}{\sqrt{\alpha_t}}(y_t)\]-
Previous
【深度学习】Multi-Cast Attention Networks for Retrieval-based Question Answering and Response Prediction -
Next
【FastAI】06_multicat