Abstract
这篇文章提出了一种用于通用图像恢复的随机微分方程(SDE)方法。
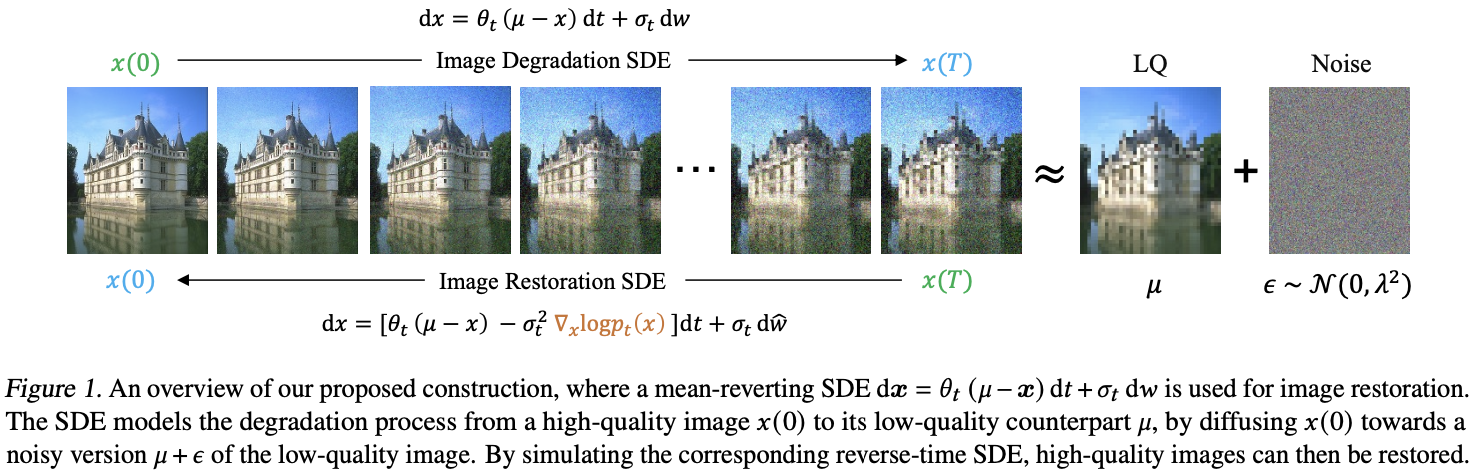
关键结构包括 mean-reverting SDE,将高质量图像转换为对应的退化图像, 其是固定高斯噪声的平均状态。
然后,通过模拟相应的反向时间SDE,我们能够恢复低质量图像的原图像,而无需依赖任何特定于任务的先验知识。
关键的是,所提出的均值 mean-reverting SDE 有一个闭式解,允许我们计算真实时间依赖的分数,并通过神经网络学习它。
此外,作者提出了一个最大概率目标来学习最佳反向轨迹,该轨迹稳定了训练并改善了恢复结果。
在实验中,作者证明提出的方法在 image deraining, deblurring, 和 denoising 的定量比较中实现了极具竞争力的性能,为两个 deraining 数据集取得了新的最先进的性能。
最后,通过图像 image super-resolution, inpainting 和 dehazing 的定性结果,进一步证明了该方法的通用性。
Background
在本节中,我们简要回顾了基于SDE的扩散模型所依据的关键概念,并展示了使用反向时间SDE生成样本的过程。令 $p_0$ 表示数据的初始分布,$t \in [0, T]$ 表示连续时间变量。 我们考虑由 SDE 的扩散过程 ${x(t)}_{t=0}^T$,
\[dx = f(x, t) dt + g(t)dw, \quad x(0) \thicksim p_0(x), \tag{1}\]其中 $f$ 和 $g$ 是漂移和扩散函数, $w$ 是标准的 Wiener 过程, $x(0) \in R^d$ 是一个初始条件。 通常,最终状态 $x(T)$ 服从一个固定均值和方差的。 通常 SDE 的思路是逐渐将数据分布变换到固定的高斯噪声。我们可以通过模拟 SDE 在时间上的反向来反转这个过程来从噪声中采样数据。Anderson (1982) 表明一个 SDE 的反向时间表征由下式给定:
\(dx = [f(x, t) - g(t)^2 \nabla_x \log p_t(x)]dt + g(t)d \hat w, \quad x(T) \thicksim p_T(x) \tag{2}\) 其中 $\hat w$ 是反向时间 Wiener 过程, $p_t(x)$ 表示在时间 $t$ 时 $x(t)$ 的边缘概率密度函数。分数函数 $\nabla_x \log p_t(x)$ 通常无法得到, 因此基于 SDE 的扩散模型通过训练一个和时间相关的神经网络 $s_\theta(x, t)$ 来估计它, 优化一个所谓的分数匹配目标。
# Method
我们提议的图像恢复方法的关键想法是将 mean-reverting SDE 与神经网络训练的最大似然目标相结合。因此将其叫做 Image Restoration Stochastic Differential Equation(IR-SDE)。首先,我们描述了 mean-reverting SDE的正向和反向过程,并调整之前描述的基于分数的训练方法来估计此 SDE。
Forward SDE for Image Degradation
让我们构造一个 SDE 的特殊情况,其分数函数具有解析解,如下所示:
\[dx = \theta_t(\mu - x)dt + \sigma_t dw \tag{3}\]其中 $\theta_t$ 和 $\sigma_t$ 是依赖于时间正参数, 其分别描述 mean-reversion 的速度 和 随机加速度。在选择 $\theta_t$ 和 $\sigma_t$ 时有很多自由,正如我们将在第5.3节中看到的,这种选择会对由此产生的复原性能产生重大影响。为了进行图像退化,我们让 $x(0)$ 和 $\mu$ 分别成为真实高质量(HQ)图像及其退化的低质量(LQ)图像 (见图1)。
 为了 SDE (3) 有闭式解, 我们设定 $\sigma_t^2 / \theta_t = 2 \lambda^2$, 其中 $\lambda^2$ 是不变的方差。
为了 SDE (3) 有闭式解, 我们设定 $\sigma_t^2 / \theta_t = 2 \lambda^2$, 其中 $\lambda^2$ 是不变的方差。
Proposition 3.1. 假设在(3) 中的 SDE 系数对所有时间步 $t$ 满足 $\sigma_t^2 / \theta_t = 2 \lambda^2$。 然后, 给定开始状态 $x(s), s < t$, SDE 的解为:
\[x(t) = \mu + (x(s) - \mu) e^{-\bar \theta_{s:t}} +\int_s^t \sigma_z e^{- \bar \theta_{z:t}} dw(z) \tag{4}\]其中 $\bar \theta_{s:t} := \int_s^t \theta_z dz$ 是已知的, 并且 transition kernel $p(x(t) \mid x(s)) = N(x(t) \mid m_{s:t}(x(s)), v_{s:t})$ 是高斯分布, 其均值 $m_{s:t}$ 和 方差 $v_{s:t}$ 由下式给定:
\[m_{s:t}(x(s)) := \mu + (x(s) - \mu) e^{-\theta_{s:t}} \\ v_{s:t} = \int_s^t \sigma_z^2 e^{-2 \bar \theta_{z:t}}dz \\ =\lambda^2 (1 - e^{-2 \bar \theta_{s:t}}) \tag{5}\]证明见 附录 A。 为了简化表示, 当开始状态为 $x(0)$, 我们用 $\bar \theta_{t}, m_t, v_t$ 替换 $\bar \theta_{0:t}, m_{0:t}, v_{0:t}$。 然后我们在任意时刻 $t$ 有 $x(t)$ 的边缘分布:
\[p_t(x) = N(x(t) \mid m_t(x), v_t), \\ m_t(x) := \mu + (x(0) - \mu)e^{-\bar \theta_t} \\ v_t := \lambda^2 (1 - e^{-2 \bar \theta_t}) \tag{6}\]注意当 $t \rightarrow \infty$, 均值 $m_t$ 收敛到低质量的图像 $\mu$ 并且方差 $v_t$ 收敛到固定的方差 $\lambda^2$ (因此叫做 “mean-reverting”)。 换句话说,前向 SDE(3)将高质量图像扩散到具有固定高斯噪声的低质量图像中。
Proof. 回想一下我们要求解的 SDE:
\(dx = \theta_t(\mu - x) dt + \sigma_t dw \tag{18}\) 其中 $\theta_t$ 和 $\sigma_t$ 是依赖时间的正函数。
Reverse-Time SDE for Image Restoration
Maximum Likelihood Learning
-
Previous
【深度学习】Three Ways of Storing and Accessing Lots of Images in Python -
Next
【深度学习】Taming Transformers for High-Resolution Image Synthesis