Deep Unfolding
病态逆问题通常求解下式:
\[y = \Phi x + n \tag{1}\]从贝叶斯视角,可以使用最大后验估计(MAP),求解上式
\[\hat x = \text{arg} \max_x p(x \mid y) = \text{arg} \max_x \frac{p(y \mid x) p(x)}{p(y)} = \text{arg} \max_x p(y \mid x)p(x) \tag{2}\]假设 $y$ 的加性高斯白噪声 $\epsilon \thicksim N(0, \sigma^2)$, MAP形式的等式(2)可以写作:
\[\begin{aligned} \hat x &= \text{arg} \max_x \exp[-\frac{1}{2 \sigma_\epsilon^2} \|y - \Phi x\|_2^2 + \log p(x)] \\ &= \text{arg} \min_x \frac{1}{2} \|y - \Phi x\|_2^2 - \sigma^2 \log p(x) \end{aligned}\tag{3}\]通过将位置噪声变量 $\sigma_\epsilon^2$ 替换为噪声平衡系数 $\lambda$, 将负对数先验函数 $p(x)$ 替换为正则项 $R(x)$, 等式(3)可写作:
\[\hat x = \text{arg}\max_x \frac{1}{2} \| y - \Phi x\|_2^2 + \lambda R(x) \tag{4}\]Proximal Gradient Descent (PGD)
PGD 算法通过以下迭代函数将等式(4)估计为迭代收敛问题:
\[\hat x^k = \text{arg} \min_x \frac{1}{2 \rho} \| x - (\hat x^{k-1} - \rho \Phi^T(\Phi \hat x^{k-1} - y))\|_2^2 + \lambda R(x) \tag{5}\]它得到一个数据子问题(梯度下降)和一个先验子问题(近端映射):
\[v^k = \hat x^{k-1} - \rho \Phi^T(\Phi x^{k-1} - y) \tag{6}\] \[\hat x^k = \text{prox}_{\lambda, J}(v^k) \tag{7}\]HQS
为了解耦等式(3)中的数据项和先验项, HQS引入一个辅助变量 $z$, 产生如下的优化问题:
\[\hat x = \text{arg} \min_x \frac{1}{2} \| y - \Phi x\| + \lambda R(z) \qquad s.t. \qquad z = x \tag{8}\]上式可以通过最小化下列问题求解:
\[L_\mu(x, z) = \frac{1}{2} \|y - \Phi x\|^2 + \lambda R(z) + \frac{\mu}{2}\|z - x\|^2 \tag{9}\]其中 $\mu$ 是惩罚参数。该问题可以通过迭代求解下列 $x$ 和 $z$ 子问题解决:
\[x_k = \text{arg} \min_x \|y - \Phi x\|^2 + \mu\|x - z_{k-1}\|^2 \tag{6a}\] \[z_k = \text{arg} \min_z \frac{1}{2(\sqrt{\lambda / \mu})^2} \| z - x_k \|^2 + R(z) \tag{6b}\](6a) 的子问题目标是找到一个 $z_{k-1}$ 的近端点,并且通常有一个快速地依赖于 $\Phi$ 的闭式解。 (6b) 的子问题从贝叶斯视角看, 对应于在噪声等级为 $\sqrt{\lambda / \mu}$ 的 $x_k$ 上高斯去噪。
ADMM
ADMM 求解等式(3)可以写作:
\[x^{k+1} = \text{arg} \min_x \frac{1}{2}\|Ax - y\|_2^2 + \frac{\rho}{2}\|x - (z^k - \mu^k) \|_2^2 \tag{7}\] \[z^{k+1} = \text{arg}\min_z \lambda R(z) + \frac{\rho}{2}\| z - (x^{k+1} + \mu^k) \|_2^2 \tag{8}\] \[\mu^{k+1} = \mu^k + (x^{k+1} - z^{k+1}) \tag{9}\]Eq. (9) 有闭式解:
\[x^{k+1} = (A^\top A + \rho I)^{-1} · [A^\top y + \rho(z^k - \mu^k)] \tag{10}\]$AA^\top$ 是一个对角矩阵, $(A^\top A + \rho I)^{-1}$ 可以通过矩阵逆公式高效求解:
\[(A^\top A + \rho I)^{-1} = \rho^{-1} I - \rho^{-1} A^\top (I + \rho A A^\top)^{-1} A \rho^{-1} \tag{11}\]Eq. (8) 可以重写为:
\[z^{k+1} = \text{arg} \min_z \frac{1}{2 (\sqrt{\lambda / \rho})^2} \| z - (x^{k+1} +\mu^k) \|_2^2 + R(z) \tag{12}\]将 Eq. (12) 代入 Eq. (11) 得到:
\[x^{k+1} = (z^k - \mu^k) + A^\top [y - A(z^k - u^k)] ./ [\text{Diag}(AA^\top) + \rho] \tag{13}\]其可以视为在噪声等级为$\sigma^2 = \lambda / \rho$ 的图像 $(x^{k+1} + \mu^k)$ 上高斯去噪:
\[z^{k+1} = \mathcal{D}_{\sigma_k}(x^{k+1}+\mu^k, \sqrt{\lambda / \mu}) \tag{14}\]Diffusion Model
DDPM
前向过程:
\[q(x_{1:T} \mid x_0) := \prod_{t=1}^T q(x_t \mid x_{t-1}), \qquad q(x_t \mid x_{t-1}) := N(x_t; \sqrt{1-\beta_t}x_{t-1}, \beta_t I) \tag{1}\]前向过程任意时间步采样 $x_t$ 在有闭式解:令 $\alpha_t := 1 - \beta_t$, $\bar \alpha_t = \prod_{s=1}^t \alpha_s$, 有:
\[q(x_t \mid x_0) = N(x_t; \sqrt{\bar \alpha_t}x_0, (1 - \bar \alpha_t)I)\]SMLD
SDEs
ODEs
CASSI System
CASSI系统的退化可以归因于各种因素,包括编码模板、色散棱镜和CCD。编码模板表示为 $M \in R^{H \times W}$, 作为原始信号 $X \in R^{H \times W \times N_\lambda}$ 的调制器, 因此调制图像第 $n_\lambda^{th}$ 个波长表示为:
\[X'_{n_\lambda} = M \odot X_{n_\lambda}\]然后, 调制后的 HSI $X’$ 经过色散过程, 其可以表示为:
\[X''(h, w, n_\lambda) = X'(h, w+d_{n_\lambda}, n_\lambda)\]其中 $X’’ \in R^{H \times (W + d_{N_\lambda}) \times N_\lambda}$, $d_{n_\lambda}$ 表示第 $n_\lambda^{th}$ 个波长的位移距离。最后,位移后的编码高光谱图像被CCD捕获为2D观测图像。该过程可以公式化为:
\[Y = \sum_{n_\lambda = 1}^{N_\lambda} X''_{n_\lambda}\]考虑观测噪声,向量形式的上式可以公式化为:
\[y = \Phi x + n\]其中 $y \in R^{H \times W}, x \in R^{HWN_{\lambda}}$, $\Phi \in R^{HW \times HWN_{\lambda}}$。$\Phi$ 是一个块对角矩阵。
Note:每一行表示对每一个像素编码,一共有 $N_\lambda$ 个块,$N_\lambda$ 对应编码 $N_\lambda$ 个波段, 因此是一个块对角矩阵, 如下图。
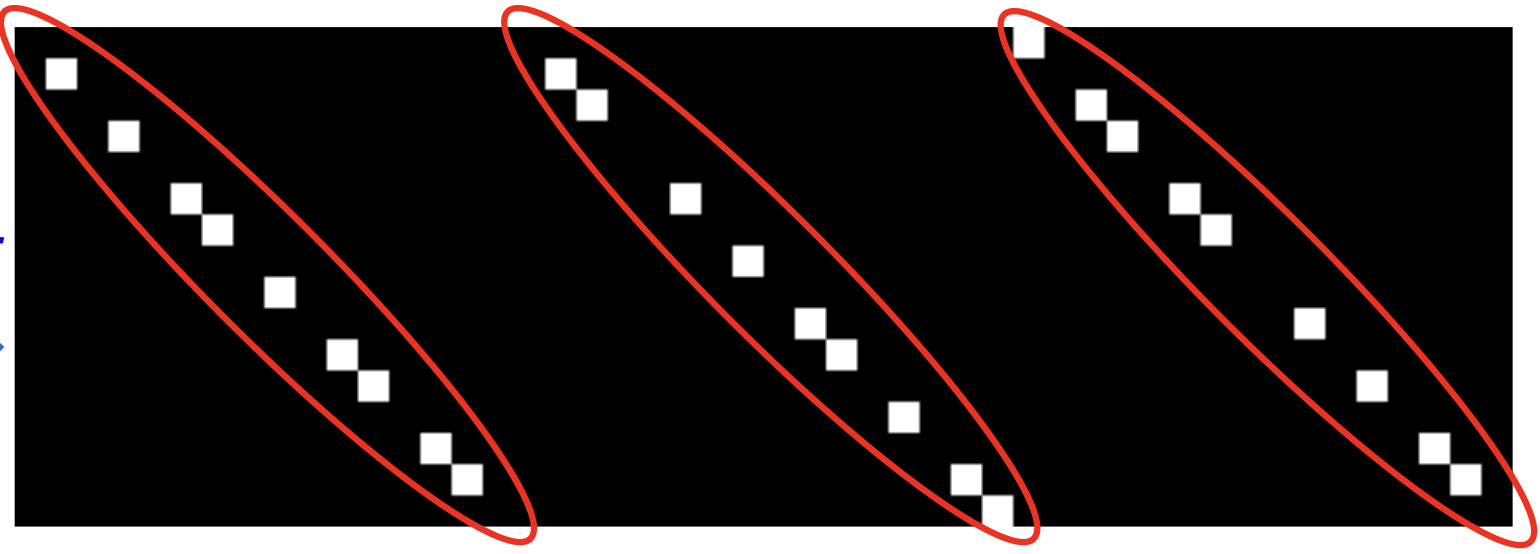
每个对角线模式对应于向量化的编码模板,相邻的对角线模式具有均匀的位移。 $\Phi \Phi^T$ 是一个对角矩阵, 其相当于
Reference
- Dong Y, Gao D, Qiu T, et al. Residual Degradation Learning Unfolding Framework with Mixing Priors across Spectral and Spatial for Compressive Spectral Imaging[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023: 22262-22271.
- Zhang K, Li Y, Zuo W, et al. Plug-and-play image restoration with deep denoiser prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 44(10): 6360-6376.
- Zheng S, Liu Y, Meng Z, et al. Deep plug-and-play priors for spectral snapshot compressive imaging[J]. Photonics Research, 2021, 9(2): B18-B29.
- Wang L, Sun C, Zhang M, et al. Dnu: Deep non-local unrolling for computational spectral imaging[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 1661-1671.
-
Previous
【深度学习】DDS2M:Self-Supervised Denoising Diffusion Spatio-Spectral Model for Hyperspectral Image Restoration -
Next
【深度学习】DPIR:Plug-and-Play Image Restoration with Deep Denoiser Prior